Malkus waterwheel (simulation)
A computer simulation of two Malkus waterwheels with different initial conditions. The initial angle differs between the wheels by 1 degree. The red and green lines are plotting the centers of mass of each wheel.
https://commons.wikimedia.org/wiki/File:Malkus_Waterwheel_side_by_side.webm
Plotting the waterwheel in 2 dimensions #
Note that what follows is speculative (on my part).
The Malkus waterwheel is a 3 dimensional system. The waterwheel is a physical 2D object (in terms of it rotating on a plane), but its state is described by 3 variables:
- angular velolicy: how fast it’s spinning
- angular position: where it is in its rotation
- water distribution
The plots shown in the video are a 2D reduction of the system. This is done by plotting the trajectory of the center of mass of the wheel.
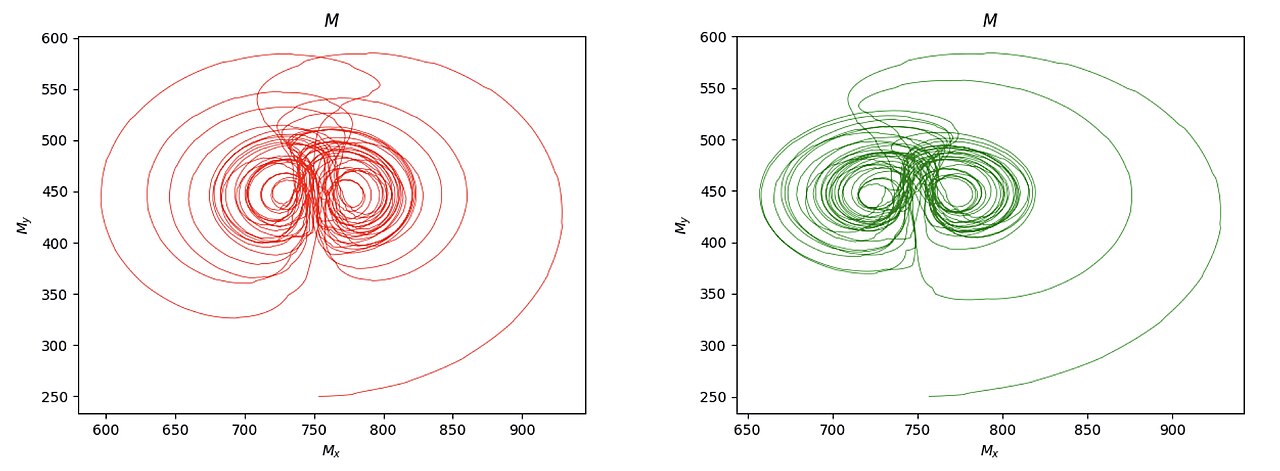
The center of mass is the vector , where and are the and components.1. The moving center of mass makes intuitive sense, but I don’t yet understand where and are coming from. I’m guessing the masses of the buckets on either side of the axis of rotation.
Related #
References #
Wikimedia Contributors. “Malkus waterwheel.” Accessed on: January 15, 2026. https://en.wikipedia.org/wiki/Malkus_waterwheel .
-
Wikimedia Contributors, “Malkus waterwheel,” Accessed on: January 15, 2026, https://en.wikipedia.org/wiki/Malkus_waterwheel . ↩︎